System.Variables¶
Variables¶
$A4PAR¶
Set axis 4 parallel to the last rotational main axis
| Name | Type | Unit | Constraint |
|---|---|---|---|
$A4PAR |
INT |
0 when unset. 1 when set |
$ABS_ACCUR¶
Switch absolutely accurate robot model on/off
| Name | Type |
|---|---|
$ABS_ACCUR |
BOOL |
$ABS_CONVERT¶
Conversion of point coordinates into absolutely accurate robot model
| Name | Type |
|---|---|
$ABS_CONVERT |
BOOL |
$ABS_RELOAD¶
Reload absolutely accurate robot model
| Name | Type |
|---|---|
$ABS_RELOAD |
BOOL |
$ACC¶
Accelerations in the ADVANCE run
| Name | Type |
|---|---|
$ACC
| CP
|
| Field | Type | Unit | Constraint | Description |
|---|---|---|---|---|
CP |
REAL
|
m/s2 | Path acceleration in the ADVANCE run |
|
ORI1 |
REAL
|
°/s2 | Swivel acceleration in the ADVANCE run |
|
ORI2 |
REAL
|
°/s2 | Rotational acceleration in the ADVANCE run |
$ACC_ACT_MA¶
Limit value of axial command acceleration
| Name | Type | Unit | Constraint |
|---|---|---|---|
$ACC_ACT_MA |
INT |
% | [0,100] |
$ACC_AXIS[]¶
Acceleration of the axes A1..A6 in the ADVANCE run
| Name | Type | Unit | Constraint |
|---|---|---|---|
$ACC_AXIS[] |
INT[6] |
% | [0,100] |
$ACC_AXIS_C[]¶
Acceleration of the axes A1..A6 in the MAIN run
| Name | Type | Unit | Constraint |
|---|---|---|---|
$ACC_AXIS_C[] |
INT[6] |
% | [0,100] |
$ACC_C¶
Accelerations in the MAIN run
| Name | Type |
|---|---|
$ACC_C
| CP
|
| Field | Type | Unit | Constraint | Description |
|---|---|---|---|---|
CP |
REAL
|
m/s2 | > 0 | Path acceleration in the MAIN run |
ORI1 |
REAL
|
°/s2 | Swivel acceleration in the MAIN run |
|
ORI2 |
REAL
|
°/s2 | Rotational acceleration in the MAIN run |
$ACC_CAR_ACT¶
The current values of the acceleration components and the total acceleration
| Name | Type |
|---|---|
$ACC_CAR_ACT
| ACC_CAR
|
| Field | Type | Unit | Constraint | Description |
|---|---|---|---|---|
X |
REAL
|
m/s2 | X component of the acceleration expressed in $ACC_CAR_TOOL frame. |
|
Y |
REAL
|
m/s2 | Y component of the acceleration expressed in $ACC_CAR_TOOL frame. |
|
Z |
REAL
|
m/s2 | Z component of the acceleration expressed in $ACC_CAR_TOOL frame. |
|
ABS |
REAL
|
m/s2 | >= 0 | Acceleration magnitude. |
Comments
...
Notes
Acceleration due to gravity (9.81 m/s2) is automatically calculated into the acceleration caused by the motion.
Note that A, B and C fields are not used.
$ACC_CAR_LIMIT¶
Maximum permissible value for the acceleration components and the total acceleration
| Name | Type |
|---|---|
$ACC_CAR_LIMIT
| ACC_CAR
|
| Field | Type | Unit | Constraint | Description |
|---|---|---|---|---|
X |
REAL
|
m/s2 | Maximum permissible value for the X component of the acceleration expressed in $ACC_CAR_TOOL frame. |
|
Y |
REAL
|
m/s2 | Maximum permissible value for the Y component of the acceleration expressed in $ACC_CAR_TOOL frame. |
|
Z |
REAL
|
m/s2 | Maximum permissible value for the Z component of the acceleration expressed in $ACC_CAR_TOOL frame. |
|
ABS |
REAL
|
m/s2 | >= 0 | Maximum permissible value for the acceleration magnitude. |
Comments
...
Notes
If the variable $ACC_CAR_STOP is set to true, then if the acceleration value is exceeded the robot is stopped (ramp-down braking) and an acknowledgement message is generated.
Note that A, B and C fields are not used.
$ACC_CAR_MAX¶
Saves the greatest absolute values of $ACC_CAR_ACT
| Name | Type |
|---|---|
$ACC_CAR_MAX
| ACC_CAR
|
Comments
...
Notes
This variable can be set to 0 to determine the maximum values.
$ACC_CAR_STOP¶
Activates/Deactivates stop reaction when the value specified in $ACC_CAR_LIMIT is exceeded.
| Name | Type |
|---|---|
$ACC_CAR_STOP |
BOOL |
$ACC_CAR_TOOL¶
A point on the tool mounted on the robot at which the current effective acceleration is measured
| Name | Type |
|---|---|
$ACC_CAR_TOOL
| FRAME
|
Comments
...
Notes
In the same way as $TOOL, $ACC_CAR_TOOL is also specified relative to the flange by means of the X, Y and Z coordinates.
The angles of rotation A, B and C indicate the positions of the 3 axes of the coordinate system in which the acceleration components are then specified.
The individual acceleration components and the total acceleration are all evaluated cyclically.
Acceleration caused by gear unit torsion or flexion of the robot is not taken into consideration.
$ACC_EXTAX[]¶
Acceleration of the external axes E1..E7 in the ADVANCE run
| Name | Type | Unit | Constraint |
|---|---|---|---|
$ACC_EXTAX[] |
INT[6] |
% | [0,100] |
$ACC_EXTAX_C[]¶
Acceleration of the external axes E1..E7 in the MAIN run
| Name | Type | Unit | Constraint |
|---|---|---|---|
$ACC_EXTAX_C[] |
INT[6] |
% | [0,100] |
$ACC_MA¶
Maximum values for path, swivel and rotational accelerations
| Name | Type |
|---|---|
$ACC_MA
| CP
|
| Field | Type | Unit | Constraint | Description |
|---|---|---|---|---|
CP |
REAL
|
m/s2 | Maximum path acceleration | |
ORI1 |
REAL
|
°/s2 | Maximum swivel acceleration | |
ORI2 |
REAL
|
°/s2 | Maximum rotational acceleration |
$ACC_OV¶
Data for acceleration with changes of override
| Name | Type |
|---|---|
$ACC_OV
| CP
|
| Field | Type | Unit | Constraint | Description |
|---|---|---|---|---|
CP |
REAL
|
m/s2 | Path acceleration with change of override | |
ORI1 |
REAL
|
°/s2 | Swivel acceleration with change of override | |
ORI2 |
REAL
|
°/s2 | Rotational acceleration with change of override |
$ACT_BASE¶
Number of the current BASE system
| Name | Type | Unit | Constraint |
|---|---|---|---|
$ACT_BASE |
INT |
index |
$ACT_EX_AX¶
Number of the current external base kinematic system
| Name | Type | Unit | Constraint |
|---|---|---|---|
$ACT_EX_AX |
INT |
index |
$ACT_TOOL¶
Number of the current tool coordinate system
| Name | Type | Unit | Constraint |
|---|---|---|---|
$ACT_TOOL |
INT |
index |
$ACT_VAL_DIF¶
Maximum permissible difference of encoder actual values when switching on system.
| Name | Type | Unit | Constraint |
|---|---|---|---|
$ACT_VAL_DIF |
INT |
increments |
Comments
...
Notes
If the limit values are exceeded, the message Perform mastering appears.
$ADAP_ACC¶
Activation of acceleration adaptation.
| Name | Type | Constraint |
|---|---|---|
$ADAP_ACC |
ADAP_ACC
|
#NONE ,#STEP1 ,#STEP2 |
Comments
...
Notes
#STEP1 and #STEP2 require valid dynamic data ($DYN_DAT).
$ADVANCE¶
Specification of the ADVANCE run.
| Name | Type | Unit | Constraint |
|---|---|---|---|
$ADVANCE |
INT |
motion blocks | [0,5] |
$ALARM_STOP¶
Specification of the ADVANCE run.
| Name | Type |
|---|---|
$ALARM_STOP |
SIGNAL |
$ANA_DEL_FLT¶
Analog output filter
| Name | Type | Constraint |
|---|---|---|
$ANA_DEL_FLT |
SW_ONOFF
|
#ON ,#OFF |
$ANIN[]¶
Analog inputs $ANIN[1]..$ANIN[8]
| Name | Type | Unit | Constraint |
|---|---|---|---|
$ANIN[] |
REAL[8] |
[-1.0, 1.0] |
Comments
...
Notes
-1.0maps to-10V+1.0maps to+10V
$ANOUT[]¶
Analog outputs $ANIN[1]..$ANIN[16]
| Name | Type | Unit | Constraint |
|---|---|---|---|
$ANOUT[] |
REAL[16] |
[-1.0, 1.0] |
Comments
...
Notes
-1.0maps to-10V+1.0maps to+10V
$APO_DIS_PTP[]¶
Maximum approximation distance for PTP motions.
| Name | Type | Unit | Constraint |
|---|---|---|---|
$APO_DIS_PTP[] |
REAL[12] |
mm or ° |
Comments
...
Notes
1..6: axisA1..A67..12: external axisE1..E6
$ASYNC_AX¶
Motion input for asynchronous external axes E1..E6, negative or positive direction.
| Name | Type |
|---|---|
$ASYNC_AX |
SIGNAL |
$ASYNC_AXi_M¶
Motion input for asynchronous external axes E1..E6, negative direction
| Name | Type |
|---|---|
$ASYNC_AXi_M |
SIGNAL |
Comments
...
Notes
SIGNAL $ASYNC_AX1_M $IN[1026]SIGNAL $ASYNC_AX2_M $IN[1026]SIGNAL $ASYNC_AX3_M $IN[1026]SIGNAL $ASYNC_AX4_M $IN[1026]SIGNAL $ASYNC_AX5_M $IN[1026]SIGNAL $ASYNC_AX6_M $IN[1026]
$ASYNC_AXi_P¶
Motion input for asynchronous external axes E1..E6, positive direction
| Name | Type |
|---|---|
$ASYNC_AXi_P |
SIGNAL |
Comments
...
Notes
SIGNAL $ASYNC_AX1_P $IN[1026]SIGNAL $ASYNC_AX2_P $IN[1026]SIGNAL $ASYNC_AX3_P $IN[1026]SIGNAL $ASYNC_AX4_P $IN[1026]SIGNAL $ASYNC_AX5_P $IN[1026]SIGNAL $ASYNC_AX6_P $IN[1026]
$ASYNC_AXIS¶
Bit arrays to switch external axes to asynchronous mode
| Name | Type | Unit | Constraint |
|---|---|---|---|
$ASYNC_AXIS |
INT |
|
Comments
...
Notes
When $ASYNC_AXIS is assigned in a KRL program, the newly-defined asynchronous axes are valid from this position until a new assignment is made.
When $ASYNC_AXIS is defined, the ADVANCE run will be stopped if the value of $ASYNC_AXIS changes.
Before a new value of $ASYNC_AXIS is saved, the system will wait until all synchronous motions (through advance run stop) and all asynchronous motions have been completed, and all axes are in position.
Thus the instruction $ASYNC_AXIS = ... can be used – along with the system variable $ASYNC_STATE – to synchronize in time synchronous and asynchronous motions.
$ASYNC_AXIS can only be modified in the KRL program, and not in the interrupt or in the SUBMIT interpreter.
The bits correspond to the external axes in ascending order :
- Bit 0 : external axis 1,
- Bit 1 : external axis 2,
- ...
If the bit is set, the external axis will be switched to asynchronous mode; if it is reset, the external axis will be switched back to synchronous mode.
$ASYNC_FLT¶
Filter for asynchronous external axes
| Name | Type | Unit | Constraint |
|---|---|---|---|
$ASYNC_FLT |
INT |
ms | [0,16] |
Comments
...
Notes
The value of $ASYNC_FLT is the filter length in milliseconds for all asynchronously coordinated motions. It corresponds to the system variable FILTER for synchronous motions.
$ASYNC_MODE¶
Mode for asynchronous external axes
| Name | Type | Unit | Constraint |
|---|---|---|---|
$ASYNC_MODE |
INT |
ms | [0,16] |
Comments
...
Notes
In the machine data of the controller, the bit mask $ASYNC_MODE can be used to set various asynchronous motion execution modes.
It is not possible to change modes while the robot controller is running. The modes can be combined in any way desired.
Certain modes must be set in order to use special applications.
In the standard setting (default mode) no $ASYNC_MODE bits are set.
Only bit 0 is used at this time :
- Bit 0 = 0 : default mode
- Bit 0 = 1 (1st bit) : mode 1
- Bit 1 = (2nd bit) : mode 2 block selection response
$ASYNC_OPT¶
Option flag for asynchronous axes are possible
| Name | Type |
|---|---|
$ASYNC_OPT |
BOOL |
Comments
...
Notes
true: asynchronous axes possiblefalse: asynchronous axes not possible
$ASYNC_STATE¶
Current asynchronous motion execution state
| Name | Type | Constraint |
|---|---|---|
$ASYNC_STATE |
ASYNC_STATE
|
#BUSY ,#IDLE ,#CANCELLED ,#PEND |
Comments
...
Notes
$ASYNC_STATE can be used to check the current asynchronous motion execution state.
Asynchronous and normal robot motions can be synchronized using this variable.
$ASYNC_T1_FAST¶
Control of the velocity reduction factor in Test 1 mode
| Name | Type | Unit | Constraint |
|---|---|---|---|
$ASYNC_T1_FAST |
INT |
[0,1] |
Comments
...
Notes
0: activated1: deactivated
$ASYS¶
Assignment of the jog keys
| Name | Type | Constraint |
|---|---|---|
$ASYS |
ASYS
|
#ROBOT ,#EXTAX ,#EXTAX2 |
$AUT¶
Signal declaration Automatic mode
| Name | Type |
|---|---|
$AUT |
SIGNAL |
$AUX_POWER¶
Signal declaration for external power supply
| Name | Type |
|---|---|
$AUX_POWER |
SIGNAL |
Comments
...
Notes
If $AUX_POWER has the value true, the external power supply is active; if the value is false, the external power supply is not active.
$AXIS_ACT¶
Current axis-specific robot position
| Name | Type |
|---|---|
$AXIS_ACT
| E6AXIS
|
$AXIS_ACTMOD¶
Display of axis angle modulo 180°
| Name | Type |
|---|---|
$AXIS_ACTMOD
| E6AXIS
|
$AXIS_BACK¶
Start position of the current motion block, axis-specific
| Name | Type |
|---|---|
$AXIS_BACK
| E6AXIS
|
$AXIS_CAL¶
Display whether axis is referenced
| Name | Type |
|---|---|
$AXIS_CAL
| AXIS_CAL
|
Comments
...
Notes
true when axis is referenced. false otherwise.
$AXIS_DIR[]¶
Direction of rotation for axis A1..A6 and external axis E1..E6
| Name | Type | Unit | Constraint |
|---|---|---|---|
$AXIS_DIR[] |
INT[12] |
{-1; 1} |
Comments
...
Notes
1..6: axisA1..A67..12: external axisE1..E6
1 for positive direction. -1 for negative direction.
$AXIS_FOR¶
Target position of the current motion block, axis-specific
| Name | Type |
|---|---|
$AXIS_FOR
| E6AXIS
|
$AXIS_HOME[]¶
Definition of the various home positions
| Name | Type |
|---|---|
$AXIS_HOME[]
|
E6AXIS[5]
|
$AXIS_INC¶
Incremental actual values of the axes
| Name | Type |
|---|---|
$AXIS_INC
| AXIS_INC
|
Comments
...
Notes
Indication of the axis position in increments.
$AXIS_INT¶
Robot position at the time of an interrupt
| Name | Type |
|---|---|
$AXIS_INT
| E6AXIS
|
$AXIS_JUS¶
Display whether axis is mastered
| Name | Type |
|---|---|
$AXIS_JUS
| AXIS_CAL
|
Comments
...
Notes
true when axis is mastered. false otherwise.
$AXIS_RESO[]¶
Resolution of the position sensing system
| Name | Type | Unit | Constraint |
|---|---|---|---|
$AXIS_RESO[] |
INT[12] |
increments / revolution |
Comments
...
Notes
Number of pulses per revolution of the encoder:
1..6: axisA1..A67..12: external axisE1..E6
$AXIS_RET¶
Axis positions when leaving the programmed path, axis-specific
| Name | Type |
|---|---|
$AXIS_RET
| E6AXIS
|
$AXIS_SEQ[]¶
Change in sequence of axis ... to axis ...
| Name | Type | Unit | Constraint |
|---|---|---|---|
$AXIS_SEQ[] |
INT[12] |
Comments
...
Notes
1..6: axisA1..A67..12: external axisE1..E6
$AXIS_TYPE[]¶
Axis type identification
| Name | Type | Unit | Constraint |
|---|---|---|---|
$AXIS_TYPE[] |
INT[12] |
[1,5] |
Comments
...
Notes
Types :
1: Linear2: Spindle3: Rotational4: Finitely rotating5: Infinitely rotating
Index :
1..6: axisA1..A67..12: external axisE1..E6
$AXWORKSPACE[]¶
Definition of axis-specific workspace monitoring
| Name | Type |
|---|---|
$AXWORKSPACE[]
|
AXBOX[8]
|
$BASE¶
Base coordinate system in relation to the world coordinate system in the ADVANCE run.
| Name | Type |
|---|---|
$BASE
| FRAME
|
Comments
...
Notes
Offset and rotation of the base coordinate system in relation to the world coordinate system in the ADVANCE run.
$BASE_C¶
Base coordinate system in relation to the world coordinate system in the MAIN run
| Name | Type |
|---|---|
$BASE_C
| FRAME
|
Comments
...
Notes
Offset and rotation of the base coordinate system in relation to the world coordinate system in the MAIN run.
$BASE_KIN[]¶
External kinematic / axes in base
| Name | Type |
|---|---|
$BASE_KIN[] |
CHAR[29] |
$BOUNCE_TIME¶
Bounce time for EMT signals
| Name | Type | Unit | Constraint |
|---|---|---|---|
$BOUNCE_TIME |
INT |
ms |
Comments
...
Notes
The signal is only accepted if it remains stable over the entire time period defined in $BOUNCE_TIME.
$BRAKE_SIG¶
Bit array for axis A1..A6 and external axis E1..E6 brakes
| Name | Type | Unit | Constraint |
|---|---|---|---|
$BRAKE_SIG |
INT |
{0,1} |
Comments
...
Notes
0: brake closed1: brake open
$BRK_DEL_COM¶
Time after which the axis brakes are closed on completion of positioning during jogging
| Name | Type | Unit | Constraint |
|---|---|---|---|
$BRK_DEL_COM |
INT |
ms |
$BRK_DEL_EX¶
Brake delay time for external axes
| Name | Type | Unit | Constraint |
|---|---|---|---|
$BRK_DEL_EX |
INT |
ms |
$BRK_DEL_PRO¶
Time after which the axis brakes are closed on completion of posi- tioning in the program
| Name | Type | Unit | Constraint |
|---|---|---|---|
$BRK_DEL_PRO |
INT |
ms |
$BRK_MAX_TM¶
Maximum deceleration time for path-maintaining Emergency Stop
| Name | Type | Unit | Constraint |
|---|---|---|---|
$BRK_MAX_TM |
INT |
ms |
$BRK_MODE¶
Brake control mode
| Name | Type | Unit | Constraint |
|---|---|---|---|
$BRK_MODE |
INT |
bit array | 'Bbbbb' |
Comments
...
Notes
The bits are counted from right to left :
Bit 0: axesA1..A6close (b = 1) / do not close (b = 0) at command end.Bit 1: axesA1..A6close individually (b = 1) / together (b = 0).Bit 2: axesA1..A6close (b = 1) / do not close (b = 0) during pauses in the motion.Bit 3: external axesE1..E6brakes close individually (b = 1) / together (b = 0) with axesA1..A6during motion pauses.
$BRK_OPENTM¶
Time delay of command value output after axis brakes have been opened
| Name | Type | Unit | Constraint |
|---|---|---|---|
$BRK_OPENTM |
INT |
ms |
$BUS_PAR¶
L2 bus interface (KRC32)
| Name | Type |
|---|---|
$BUS_PAR
| BUS
|
$CABLE2_MON¶
Additional motor cable monitoring
| Name | Type |
|---|---|
$CABLE2_MON |
BOOL |
Comments
...
Notes
Specifies whether the connection of the second motor cable should be monitored (true for special machines) :
true: monitoring activatedfalse: monitoring deactivated
$CAL_DIFF¶
Mastering difference for EMT mastering with check run
| Name | Type | Unit | Constraint |
|---|---|---|---|
$CAL_DIFF |
INT |
$CALP¶
Reference point offset between mathematical zero point and encoder zero point
| Name | Type |
|---|---|
$CALP
| E6AXIS
|
$CIRC_TYPE¶
Orientation control with CIRC blocks in the ADVANCE run
| Name | Type | Constraint |
|---|---|---|
$CIRC_TYPE |
CIRC_TYPE
|
#BASE ,#PATH |
$CIRC_TYPE_C¶
Orientation control with CIRC blocks in the MAIN run
| Name | Type | Constraint |
|---|---|---|
$CIRC_TYPE_C |
CIRC_TYPE
|
#BASE ,#PATH |
$CMD¶
Display assignment number (handle) for command channel
| Name | Type | Unit | Constraint |
|---|---|---|---|
$CMD |
INT |
$COM_NAME¶
Command which is to be processed after next start
| Name | Type |
|---|---|
$COM_NAME |
CHAR[486] |
$COM_VAL_MI[]¶
Limitation of command speed for axis A1..A6 and external axis E1..E6
| Name | Type | Unit | Constraint |
|---|---|---|---|
$COM_VAL_MI[] |
REAL[12] |
Comments
...
Notes
1..6: axisA1..A67..12: external axisE1..E6
$CONF_MESS¶
Signal declaration for reset acknowledgement messages.
| Name | Type |
|---|---|
$CONF_MESS |
SIGNAL |
Comments
...
Notes
External confirmation
$COSYS¶
Coordinate system for jogging
| Name | Type | Constraint |
|---|---|---|
$COSYS |
COSYS
|
#AX ,#CAR |
$COUNT_I[]¶
Freely usable integer variables
| Name | Type | Unit | Constraint |
|---|---|---|---|
$COUNT_I[] |
INT[32] |
Comments
...
Notes
Used as counters in the VW package
$COUP_COMP[,]¶
Axis coupling factors
| Name | Type |
|---|---|
$COUP_COMP[,]
|
FRA[6,6]
|
$CP_VEL_TYPE¶
Reduction of the CP path velocity
| Name | Type | Constraint |
|---|---|---|
$CP_VEL_TYPE |
COSYS
|
#AX ,#CAR |
Comments
...
Notes
If the axis limit values are exceeded, the CP velocity is reduced. Reduction is always active in Cartesian jogging.
$CP_VEL_TYPE¶
Reduction of the CP path velocity
| Name | Type | Constraint |
|---|---|---|
$CP_VEL_TYPE |
CP_VEL_TYPE
|
#CONSTANT ,#VAR_T1 ,#VAR_ALL |
Comments
...
Notes
If the axis limit values are exceeded, the CP velocity is reduced. Reduction is always active in Cartesian jogging.
$CPVELREDMELD¶
Generation of message if path velocity reduced
| Name | Type | Unit | Constraint |
|---|---|---|---|
$CPVELREDMELD |
INT |
Comments
...
Notes
The message contains the point name and the maximum reduction in the specific motion command.
0: Generation of message deactivated.1: Generation of message in the event of block change in jog mode.100: Generation of message in the event of block change in all modes.
$CURR_ACT[]¶
Actual current of axes
| Name | Type | Unit | Constraint |
|---|---|---|---|
$CURR_ACT[] |
REAL[12] |
% | [-100,100] |
Comments
...
Notes
Current value of current of axes A1..A6 and external axes E1..E6 in percentage of maximum servo drive module current $CURR_MAX (-100% to +100%).
1..6: axisA1..A67..12: external axisE1..E6
$CURR_CAL[]¶
Current calibration of axis in the power module
| Name | Type | Unit | Constraint |
|---|---|---|---|
$CURR_CAL[] |
REAL[12] |
Comments
...
Notes
For KRC 1a and KRC 2 : calibration = 1.
1: High power2: Medium / low power-
4: Low power -
1..6: axisA1..A6 7..12: external axisE1..E6
$CURR_COM_EX[]¶
Current limitation for external axes in jog mode
| Name | Type | Unit | Constraint |
|---|---|---|---|
$CURR_COM_EX[] |
REAL[6] |
Comments
...
Notes
1..6: external axisE1..E6
$CURR_LIM[]¶
Current limitation
| Name | Type | Unit | Constraint |
|---|---|---|---|
$CURR_LIM[] |
INT[12] |
% | [0,100] |
Comments
...
Notes
1..6: axisA1..A67..12: external axisE1..E6
$CURR_MAX[]¶
Maximum effective current on power module output
| Name | Type | Unit | Constraint |
|---|---|---|---|
$CURR_MAX[] |
REAL[12] |
A |
Comments
...
Notes
Effective current must be present
1..6: axisA1..A67..12: external axisE1..E6
$CURR_MON[]¶
Permissible rated current
| Name | Type | Unit | Constraint |
|---|---|---|---|
$CURR_MON[] |
REAL[12] |
Comments
...
Notes
Defines the limit for i2 x t monitoring for 55°C
1..6: axisA1..A67..12: external axisE1..E6
$CURR_RED[,]¶
Current limitation for axes in % of the maximum current
| Name | Type | Unit | Constraint |
|---|---|---|---|
$CURR_RED[,] |
REAL[12,2] |
Comments
...
Notes
[1..6,:]: axisA1..A6-
[7..12,:]: external axisE1..E6 -
[:,1]: positive limit [:,2]: negative limit
$CYC_DEFi[]¶
Input text for the corresponding cyclical flag
| Name | Type |
|---|---|
$CYC_DEFi[] |
CHAR[470] |
Comments
...
Notes
- i in
[1,32]
$CYCFLAG[]¶
Cyclical flags
| Name | Type |
|---|---|
$CYCFLAG[] |
BOOL[32] |
Comments
...
Notes
There are 32 cyclical flags available.
These flags are cyclically updated independently of program execution.
The default value is false.
$DATA_INTEGRITY¶
A variable of type SIGNAL is output either as groups of bits or one bit at a time
| Name | Type |
|---|---|
$DATA_INTEGRITY |
BOOL |
Comments
...
Notes
If the signal variable is output as groups of bits, the signal must be defined in one of the defined data objects OUTB, OUTW or OUTDW.
true: data are output as groups of bitsfalse: data are output one bit at a time
$DATA_SERx¶
Number of serial receive messages read in the channel x buffer
| Name | Type | Unit | Constraint |
|---|---|---|---|
$DATA_SERx |
INT |
$DATAPATH[]¶
Name of the SRC file whose variables in the data list are to be accessed using the variable modification function
| Name | Type |
|---|---|
$DATAPATH[] |
CHAR[16] |
$DATE¶
System time and system date
| Name | Type |
|---|---|
$DATE
| DATE
|
$DECEL_MB¶
Deceleration time during maximum braking
| Name | Type | Unit | Constraint |
|---|---|---|---|
$DECEL_MB |
REAL |
ms |
Comments
...
Notes
Braking ramp for dynamic braking.
In maximum braking, the current actual speed value is taken as the command speed value and run down the ramp set in the machine datum $DECEL_MB to zero.
$DEF_A4FIX¶
Fixing of axis 4 when palletizing
| Name | Type |
|---|---|
$DEF_A4FIX |
BOOL |
Comments
...
Notes
Defines whether the robot has 5 or 6 axes.
When a program is loaded or reset, $PAL_MODE = $DEF_A4FIX is set, i.e. palletizing mode is thus automatically activated for a 5-axis robot and not for a normal 6-axis robot.
true: 5-axis robot (axis 4 fixed)false: 6-axis robot
$DEF_FLT_CP¶
Default filter for CP motion
| Name | Type | Unit | Constraint |
|---|---|---|---|
$DEF_FLT_CP |
INT |
$DEF_FLT_PTP¶
Default filter for PTP motion
| Name | Type | Unit | Constraint |
|---|---|---|---|
$DEF_FLT_PTP |
INT |
$DEF_L_CM¶
Center of mass frame for the default load on the flange in the flange coordinate system
| Name | Type |
|---|---|
$DEF_L_CM
| FRAME
|
| Field | Type | Unit | Constraint | Description |
|---|---|---|---|---|
X |
REAL
|
Offset in the X direction |
||
Y |
REAL
|
Offset in the Y direction |
||
Z |
REAL
|
Offset in the Z direction |
||
A |
REAL
|
Rotation about the Z axis |
||
B |
REAL
|
Rotation about the Y axis |
||
C |
REAL
|
Rotation about the X axis |
$DEF_L_J¶
Default moment of inertia of the load on the flange in the default center of mass coordinate system of the load
| Name | Type |
|---|---|
$DEF_L_J
| INERTIA
|
$DEF_L_M¶
Default mass of the load on the flange
| Name | Type | Unit | Constraint |
|---|---|---|---|
$DEF_L_M |
REAL |
kg ? |
$DEF_LA3_CM¶
Center of mass frame for the default mass of the supplementary load on axis 3 in the flange coordinate system
| Name | Type |
|---|---|
$DEF_LA3_CM
| FRAME
|
| Field | Type | Unit | Constraint | Description |
|---|---|---|---|---|
X |
REAL
|
Offset in the X direction |
||
Y |
REAL
|
Offset in the Y direction |
||
Z |
REAL
|
Offset in the Z direction |
||
A |
REAL
|
Rotation about the Z axis |
||
B |
REAL
|
Rotation about the Y axis |
||
C |
REAL
|
Rotation about the X axis |
$DEF_LA3_J¶
DDefault moment of inertia of the supplementary load on axis 3
| Name | Type |
|---|---|
$DEF_LA3_J
| INERTIA
|
$DEF_LA3_M¶
Default mass of the supplementary load on axis 3
| Name | Type | Unit | Constraint |
|---|---|---|---|
$DEF_LA3_M |
REAL |
kg ? |
$DEF_OV_JOG¶
Default value for override in jog mode
| Name | Type | Unit | Constraint |
|---|---|---|---|
$DEF_OV_JOG |
INT |
$DEVICE¶
Operator control device status
| Name | Type | Constraint |
|---|---|---|
$DEVICE |
DEVICE
|
#ACTIVE ,#BLOCK ,#PASSIVE ,#OFF |
$DH_4¶
Denavit-Hartenberg parameters for the wrist (frame between A4 and A5)
| Name | Type |
|---|---|
$DH_4
| DHART
|
| Field | Type | Unit | Constraint | Description |
|---|---|---|---|---|
DHART_A |
REAL
|
mm | ||
DHART_D |
REAL
|
mm | ||
DHART_ALPHA |
REAL
|
° |
Comments
...
Notes
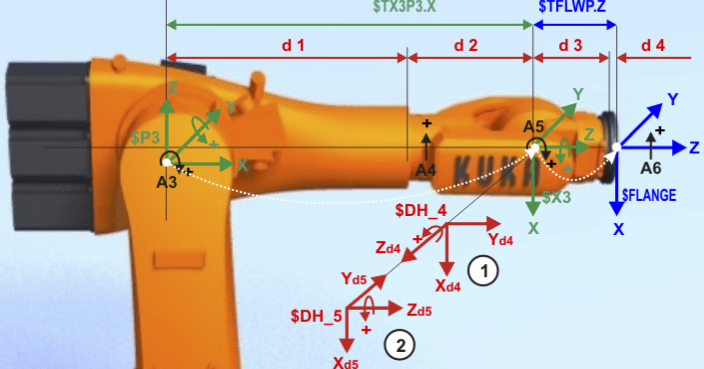
$DH_5¶
Denavit-Hartenberg parameters for the wrist (frame between A5 and A6)
| Name | Type |
|---|---|
$DH_5
| DHART
|
| Field | Type | Unit | Constraint | Description |
|---|---|---|---|---|
DHART_A |
REAL
|
mm | ||
DHART_D |
REAL
|
mm | ||
DHART_ALPHA |
REAL
|
° |
Comments
...
Notes
$DIGINi¶
Assignment of digital inputs 1 to 6
| Name | Type |
|---|---|
$DIGINi |
SIGNAL |
Comments
...
Notes
SIGNAL $DIGIN1 $IN[1026] TO $IN[1026]SIGNAL $DIGIN2 $IN[1026] TO $IN[1026]SIGNAL $DIGIN3 $IN[1026] TO $IN[1026]SIGNAL $DIGIN4 $IN[1026] TO $IN[1026]SIGNAL $DIGIN5 $IN[1026] TO $IN[1026]SIGNAL $DIGIN6 $IN[1026] TO $IN[1026]
$DIGINiCODE¶
Defines whether or not the value for $DIGINi is preceded by a sign
| Name | Type | Constraint |
|---|---|---|
$DIGINiCODE |
DIGINCODE
|
#SIGNED ,#UNSIGNED |
Comments
...
Notes
#SIGNED: with sign#UNSIGNED: without sign
$DIR_CAL¶
Defines the referencing direction for each axis A1..A6 and external axis E1..E6
| Name | Type | Unit | Constraint |
|---|---|---|---|
$DIR_CAL |
INT |
bit array | 'Bbbbbbbbbbbbb' |
Comments
...
Notes
Bit[n] = 0: reference point of axis n is approached in the positive directionBit[n] = 1: reference point of axis n is approached in the negative direction
$DIS_WRP1¶
Average distance of wrist point from singularity 1 (Alpha 1 singularity)
| Name | Type | Unit | Constraint |
|---|---|---|---|
$DIS_WRP1 |
REAL |
$DIS_WRP2¶
Average distance of wrist point from singularity 2 (Alpha 5 singularity)
| Name | Type | Unit | Constraint |
|---|---|---|---|
$DIS_WRP2 |
REAL |
$DISPLAY_REF¶
New form output when $DISPLAY_VAR is changed
| Name | Type |
|---|---|
$DISPLAY_REF |
BOOL |
$DISPLAY_VAR[]¶
Observable variables
| Name | Type |
|---|---|
$DISPLAY_VAR[]
|
DISPLAY_VAR[32]
|
$DIST_NEXT¶
Distance still to be covered to the next point
| Name | Type | Unit | Constraint |
|---|---|---|---|
$DIST_NEXT |
REAL |
$DISTANCE¶
Curve length, CP motion
| Name | Type | Unit | Constraint |
|---|---|---|---|
$DISTANCE |
REAL |
mm |
$DRIVE_CART¶
Option bit: PTP points with Cartesian coordinates
| Name | Type |
|---|---|
$DRIVE_CART |
BOOL |
Comments
...
Notes
true: PTP points can have cartesian coordinates- `false : PTP points cannot have cartesian coordinates
$DRIVE_CP¶
Option bit: Cartesian robot motion possible (LIN, CIRC)
| Name | Type |
|---|---|
$DRIVE_CP |
BOOL |
Comments
...
Notes
true: cartesian robot motion possible- `false : cartesian robot motion not possible
$DRIVES_OFF¶
Signal declaration Drives OFF
| Name | Type |
|---|---|
$DRIVES_OFF |
SIGNAL |
$DRIVES_ON¶
Signal declaration Drives ON
| Name | Type |
|---|---|
$DRIVES_ON |
SIGNAL |
$DSECHANNEL¶
Assignment of axes to channels of the digital servoelectronics (DSE)
| Name | Type | Unit | Constraint |
|---|---|---|---|
$DSECHANNEL |
INT |
$DYN_DAT[]¶
Model data of the robot for acceleration adaptation, higher motion profile and kinetic energy
| Name | Type | Unit | Constraint |
|---|---|---|---|
$DYN_DAT[] |
REAL[350] |
Comments
...
Notes
Contains the model data of the robot, which are required for acceleration adaptation, the higher motion profile and the calculation of kinetic energy (moments of inertia, friction values, etc.)
$OV_PRO¶
Program override
| Name | Type | Unit | Constraint |
|---|---|---|---|
$OV_PRO |
INT |
% | [0, 100] |
Comments
...
Notes
Program override is the velocity of the robot during program execution.
The program override is specified as a percentage of the programmed velocity. In T1 mode, the maximum velocity is 250 mm/s, irrespective of the value that is set.
$PRO_MODE¶
Program run mode dependent on $INTERPRETER
| Name | Type | Constraint |
|---|---|---|
$PRO_MODE |
PRO_MODE
|
#ISTEP ,#PSTEP ,#MSTEP ,#CSTEP ,#GO ,#BSTEP |
$PRO_MODE0¶
Program run mode of the SUBMIT interpreter
| Name | Type | Constraint |
|---|---|---|
$PRO_MODE0 |
PRO_MODE
|
#ISTEP ,#PSTEP ,#MSTEP ,#CSTEP ,#GO ,#BSTEP |
$PRO_MODE1¶
Program run mode of the ROBOT interpreter
| Name | Type | Constraint |
|---|---|---|
$PRO_MODE1 |
PRO_MODE
|
#ISTEP ,#PSTEP ,#MSTEP ,#CSTEP ,#GO ,#BSTEP |
$PRO_NAME0[]¶
Process name of the SUBMIT interpreter
| Name | Type |
|---|---|
$PRO_NAME0[] |
CHAR[24] |
$PRO_NAME1[]¶
Process name of the ROBOT interpreter
| Name | Type |
|---|---|
$PRO_NAME1[] |
CHAR[24] |
$PRO_NAME[]¶
Process name dependent on $INTERPRETER
| Name | Type |
|---|---|
$PRO_NAME[] |
CHAR[24] |
$PRO_STATE¶
Process state dependent on $INTERPRETER
| Name | Type | Constraint |
|---|---|---|
$PRO_STATE |
PRO_STATE
|
#P_FREE ,#P_RESET ,#P_ACTIVE ,#P_STOP ,#P_END |
$PRO_STATE0¶
Process state of the SUBMIT interpreter
| Name | Type | Constraint |
|---|---|---|
$PRO_STATE0 |
PRO_STATE
|
#P_FREE ,#P_RESET ,#P_ACTIVE ,#P_STOP ,#P_END |
$PRO_STATE1¶
Process state of the ROBOT interpreter
| Name | Type | Constraint |
|---|---|---|
$PRO_STATE1 |
PRO_STATE
|
#P_FREE ,#P_RESET ,#P_ACTIVE ,#P_STOP ,#P_END |